








.png)
Process layout
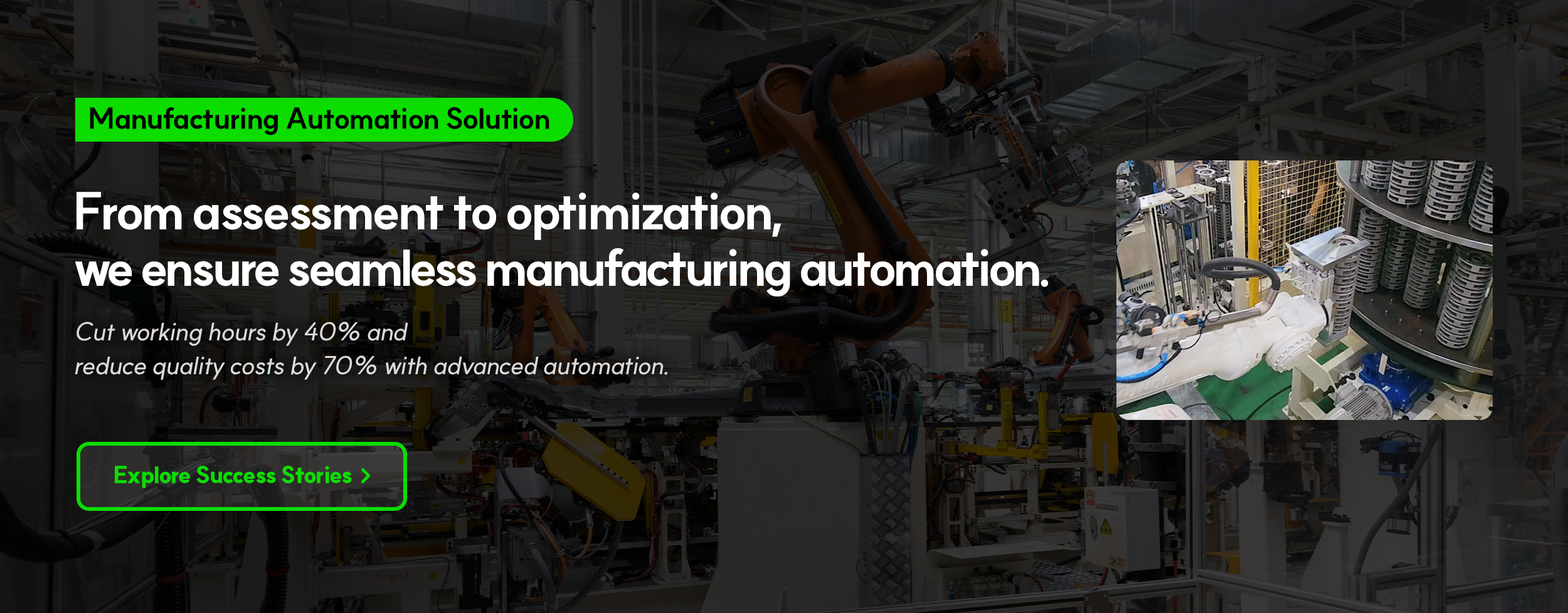
This solution is a 'carrier input automation system' installed in a factory producing automotive catalysts, and consists of advanced automation equipment integrating a 6-axis robot, Cartesian robot, 3D Vision, and a transfer unit.
This system Automating the entire process from automatically recognizing and picking up boxes loaded on pallets → feeding carriers into the main conveyor → discharging empty boxes and trays. The purpose is to significantly reduce the burden of repetitive tasks on workers and improve production efficiency and stability.
In particular, to accurately recognize boxes of various heights and 6 types of carrier patterns Dual 3D Vision system The key feature is that it improves work quality and process reliability by applying [this].
Components
| Robot | Hyundai Robotics HDR80L-26 (YS080L) Industrial Robot |
|---|---|
| Peripherals | 3D Vision System (2 units) |
Workflow
| STEP 1. | Pallet input |
|---|---|
| STEP 2. | Box recognition and transfer movement |
| STEP 3. | Carrier main conveyor input |
| STEP 4. | Empty box and tray discharge |
Features
✔ Implementation of 'High-speed Carrier Automation' Rarely Seen in Korea
In the field of small catalysts for vehicles Various carrier patterns + high C/T requirements It is a rare case that satisfies both simultaneously.
✔ Dual 3D Vision Based Precision Recognition System
Accurate recognition of box position/pose
Real-time correction even with carrier variation of ±5mm
Securing recognition efficiency even for dark-colored coated products through parameter refinement
✔ Designed to minimize carrier quality degradation
Orthogonal robot-based uniform carrier handling
Stable input of even shaken or warped products
✔ Supports various product types
box heights differ
6 types of carrier patterns
Response to tray shaking and positional instability
✔ SW logic optimization for stable system operation
PLC recipe automatic call
Alarm when production plan is mismatched
Results
| Key Benefits | Saves 3 personnel per shift
Stable 24-hour operation without break time
Reduced risk of sudden workforce shortages
Reduced cycle time (C/T)
Robot-based assurance of uniform quality
One-pass automation from empty box to tray discharge |
|---|---|
| Client Feedback | This automated carrier input system has been a great help in simultaneously ensuring productivity and stability. In particular, given the nature of the process which requires handling various box heights and carrier patterns, the stable operation of the robot and 3D Vision was our biggest concern however, the actual operation results showed that recognition accuracy and equipment reliability exceeded expectations. Previously, there were difficulties in manpower allocation due to the high difficulty and repetitive nature of the work, but after automation, the workload was significantly reduced, leading to increased employee satisfaction.
In addition, thanks to equipment alarm monitoring via SOLlink, we were able to respond immediately to abnormal situations, significantly reducing line downtime. Now that this project has been successfully stabilized, we have high expectations for expanding the application of the same system to other lines.
|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Curious about the robots used?
.png&w=256&q=75)
Recommended Solution

Automated Electric Vehicle Console Assembly with EPSON SCARA Robots! 🦾
Bigwave Robotics (Marosol) established an automated assembly line for console parts for Kia Motors' newly launched SUV-type electric vehicle.

Automated automotive battery palletizing: Safely stack batteries weighing over 60kg with the YASKAWA GP225 💪
This solution automates the repalletizing process for Atlas batteries produced by Hankook & Company for export. Due to the diverse import pallet specifications, customer-specific palletizing patterns, and product types, the total number of possible scenarios exceeds 200. The goal is to standardize these scenarios and ensure line stability by supporting a throughput of 10 pallets per minute for medium-sized batteries and 6 pallets per minute for large-sized batteries. [Pallet Feeder & Pallet Conveyor] This solution allows for the use of up to five different pallet types per country, ensuring a smooth 10-stack logistics cycle. Destacked pallets are transported to the battery palletizing position and aligned simultaneously. Completed pallets are transported to the discharge position. [Battery Sorter] Batteries fed inline are automatically sorted into 1st, 2nd (series/parallel), and 3rd layers according to the preset palletizing pattern. The robot then discharges the batteries, repeating the initialization process. [Robot Palletizer] Once aligned, the batteries are picked and placed at the palletizing position on the conveyor, repeating the pick-and-place process according to the specified location and number of layers. Honeycomb feeds are automatically inserted into each layer according to the settings. [Honeycomb Feeder & Sorter] Automatically sorts and inserts honeycombs into each layer of NO-BOX batteries.

Yuhan-Kimberly's Choice! Fully Automated Depalletizing and String Cutting 📦
Process Overview This implementation case, implemented at Yuhan-Kimberly's Chungju factory , combines a Yaskawa industrial robot with a string cutting workstation to achieve automated depalletizing and string cutting. The client introduced the depalletizing system to reduce labor costs and work fatigue, and expressed strong interest in automating rope cutting and discharge to maximize cost savings and efficiency. This solution sorts and cuts boxes of various sizes before feeding them to the case packer, improving the efficiency of the box feeding and rope cutting processes, while also reducing the physical burden on workers and ensuring safety. Project Background and Objectives At Yuhan-Kimberly's Chungju factory , the process of dismantling palletized boxes and loading them into case packers individually was entirely manual. This process was highly repetitive and presented a constant risk of safety accidents due to the use of knives during the removal of the twine. The goal of this project was to automate the entire process, from depalletizing to loading into the case packer, minimizing human dependence. Furthermore, by unmanning the twine cutting process, we aimed to ensure worker safety, reduce fatigue and on-site personnel burden, and ensure stable plant operations.